Prototype and Documents
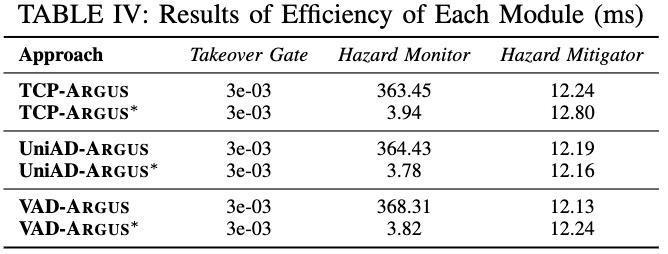
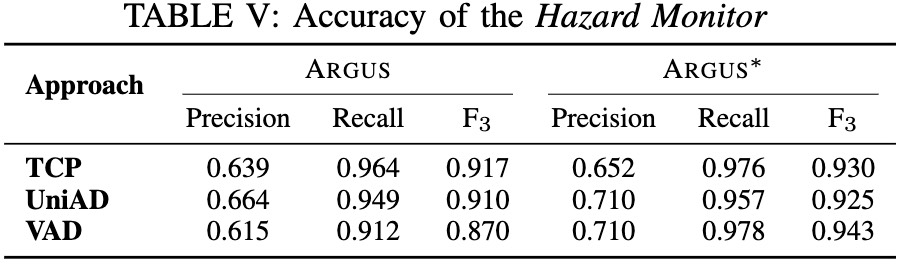
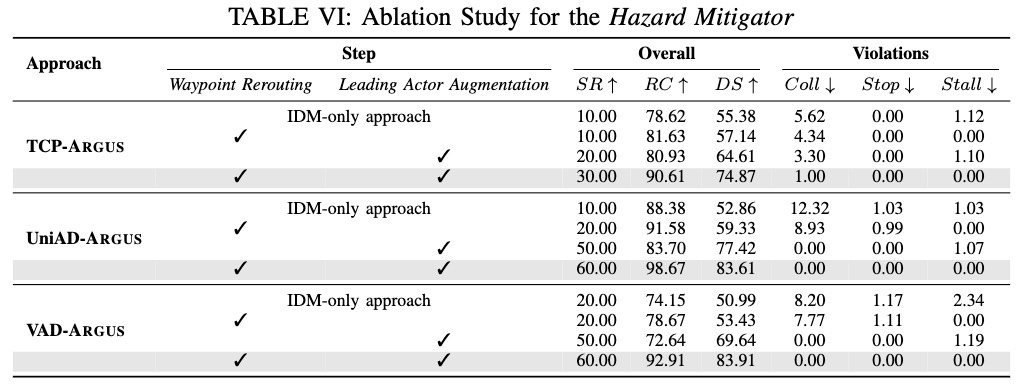
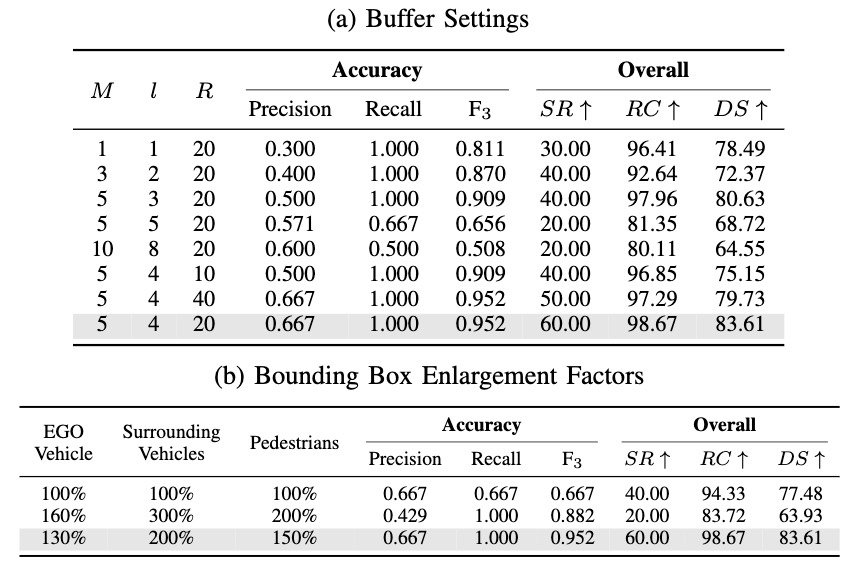
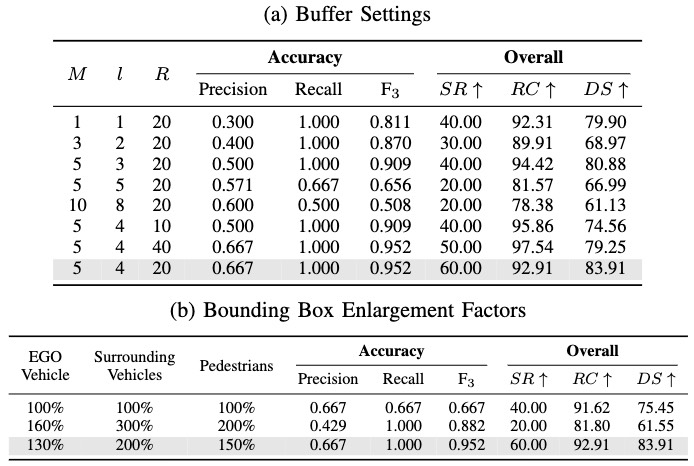
Argus comprises three components, i.e., the Takeover Gate, the Hazard Monitor and the Hazard Mitigator. Every trajectory generated by the ADS passes through the Takeover Gate, a component responsible for dynamic control switching between the ADS and the Hazard Mitigator that is built upon the intelligent driver model. The Takeover Gate leverages three takeover buffers and one recovery buffer, all maintained by the Hazard Monitor, to determine whether a given trajectory is safe for execution by a takeover and recovery mechanism. If the EGO vehicle (i.e., the vehicle controlled by the ADS) is deemed unsafe, control is taken over by the Hazard Mitigator for hazard mitigation, and is only returned to the ADS once safety is re-established.
We have implemented a prototype of Argus with 6,709 lines of Python code. The prototype of Argus and documents are available on GitHub.